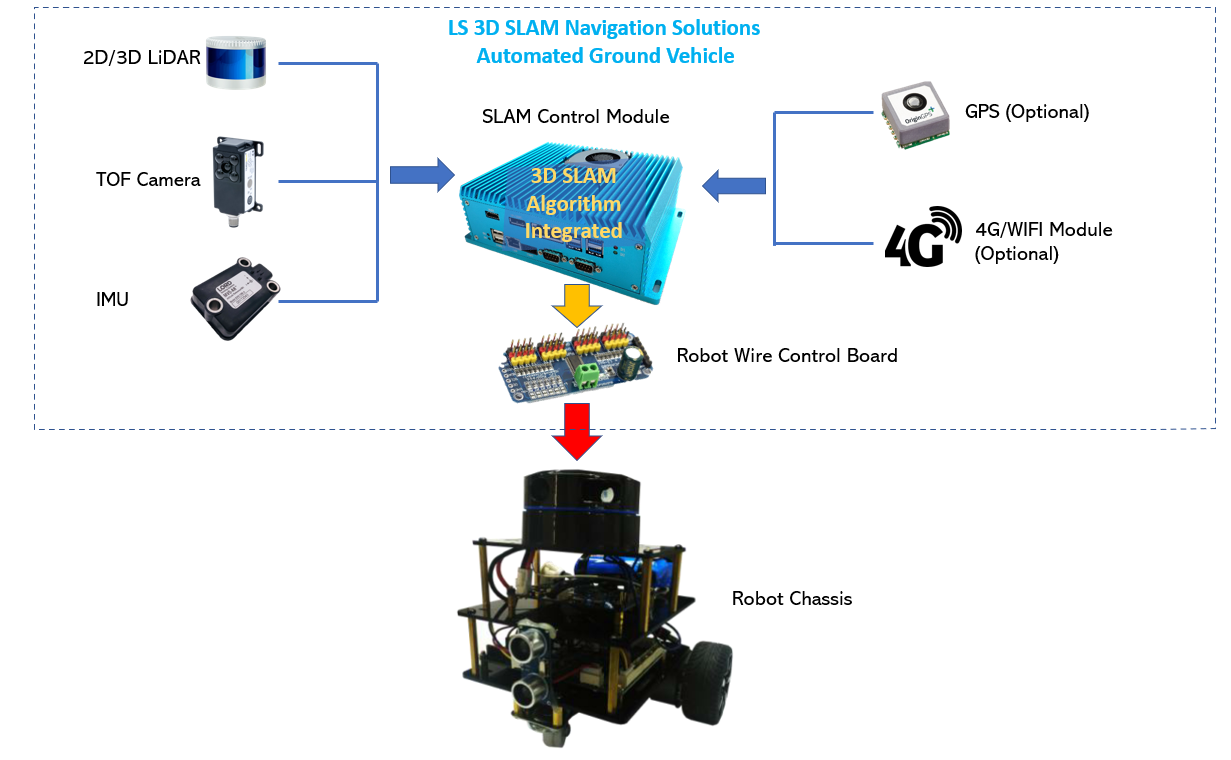
LIDARのみに依存しているからといって、ロボットが自律的に移動できるわけではありません。 LIDARは、2Dまたは3D次元空間で点群データを取得するために継続的にスキャンできますが、これを移動ロボットが直接使用することはできません。 SLAMアルゴリズムは、マップの構築とパスの計画に必要です。
LSは、自律航法を実現するために、3DSLAMとマルチセンサーフュージョンに基づくシステムを開発しました。クライアントは、システムに基づいて二次開発を実行し、独自のアプリケーション機能を実現することもできます。
LS 3D SLAMシステムを備えたフォークリフトはAGVになり、パレットとコンテナの識別、フォーク操作の制御、インテリジェントなディスパッチおよび監視システムなどの追加機能が追加されます。