Avec le développement rapide de la logistique intelligente et de l'entreposage intelligent, des chariots élévateurs automatisés sont apparus pour réduire les coûts d'exploitation et améliorer les performances de sécurité de l'entrepôt. Leishen a développé un ensemble complet de systèmes d'application de chariots élévateurs sans pilote qui peuvent être appliqués à de grands centres de stockage logistique basés sur des capteurs lidar, qui peuvent être efficacement déployés dans la manutention de marchandises à la demande en intérieur et en extérieur, tels que les ports, les aéroports, les entrepôts d'usine et centres logistiques, etc.
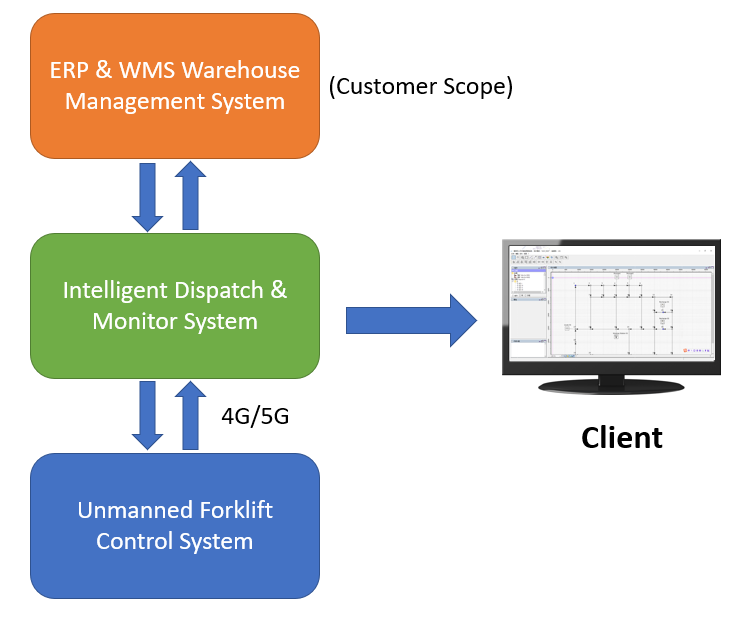
Le système est compatible avec la plupart des chariots élévateurs électriques dotés d'un accès par bus CAN au conducteur du chariot élévateur. La structure globale du système est illustrée dans l'image ci-dessous :