Con el rápido desarrollo de la logística inteligente y el almacenamiento inteligente, han surgido montacargas automatizados para ahorrar costos de operación y mejorar el rendimiento de seguridad del almacén. Leishen ha desarrollado un conjunto completo de sistemas de aplicación de carretillas elevadoras no tripuladas que se pueden aplicar a grandes centros de almacenamiento logístico basados en sensores lidar, que se pueden implementar de manera efectiva en requisitos de manejo de carga bajo demanda en interiores y exteriores, como puertos, aeropuertos, almacenes de fábrica y centros logísticos, etc.
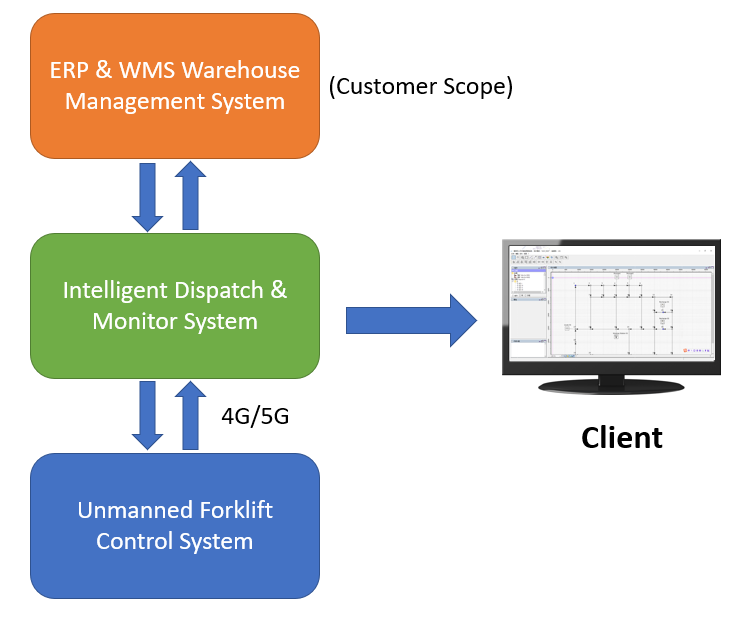
El sistema es compatible con la mayoría de las carretillas elevadoras eléctricas que tienen acceso de bus CAN al conductor de la carretilla elevadora. La estructura general del sistema se muestra en la siguiente imagen: