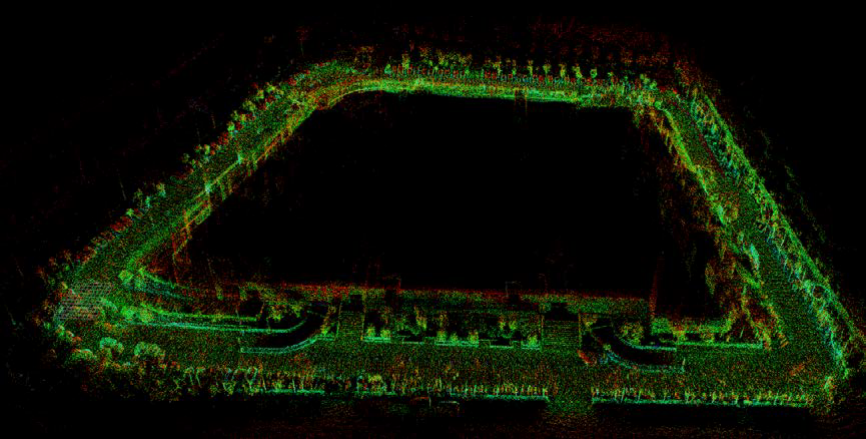
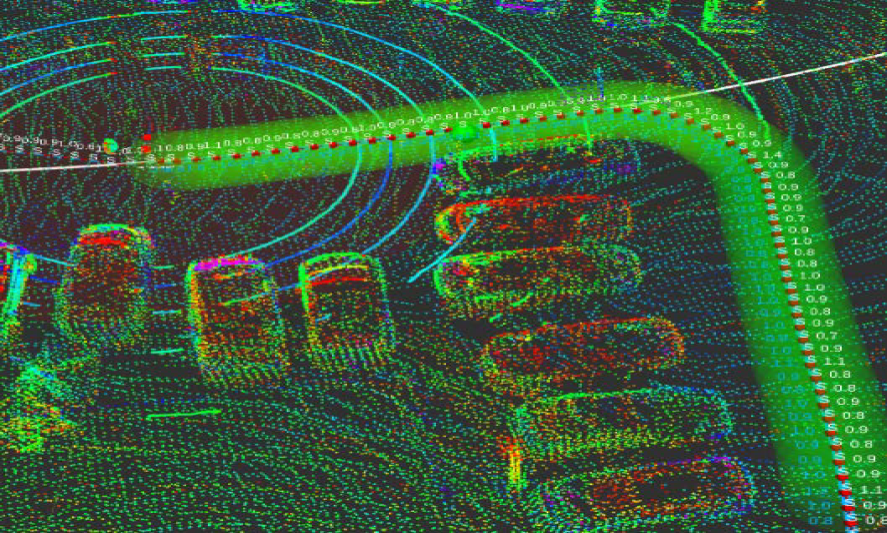
Met de snelle ontwikkeling van intelligente logistiek en intelligente opslag zijn geautomatiseerde vorkheftrucks ontstaan om de bedrijfskosten te besparen en de veiligheidsprestaties van het magazijn te verbeteren. Leishen heeft een complete set toepassingssystemen voor onbemande vorkheftrucks ontwikkeld die kunnen worden toegepast op grote logistieke opslagcentra op basis van lidar-sensoren, die effectief kunnen worden ingezet bij vrachtafhandeling on-demand binnen- en buitenvereisten, zoals havens, luchthavens, fabrieksmagazijnen en logistieke centra, enz.
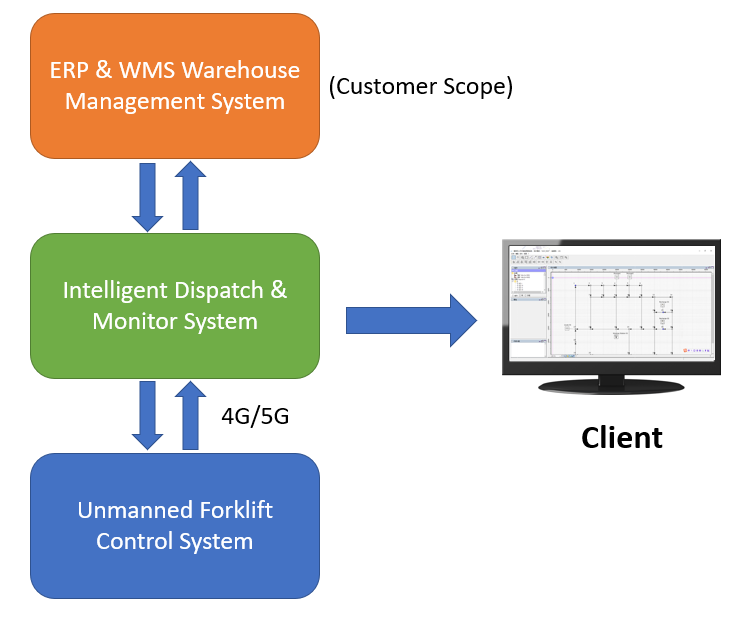
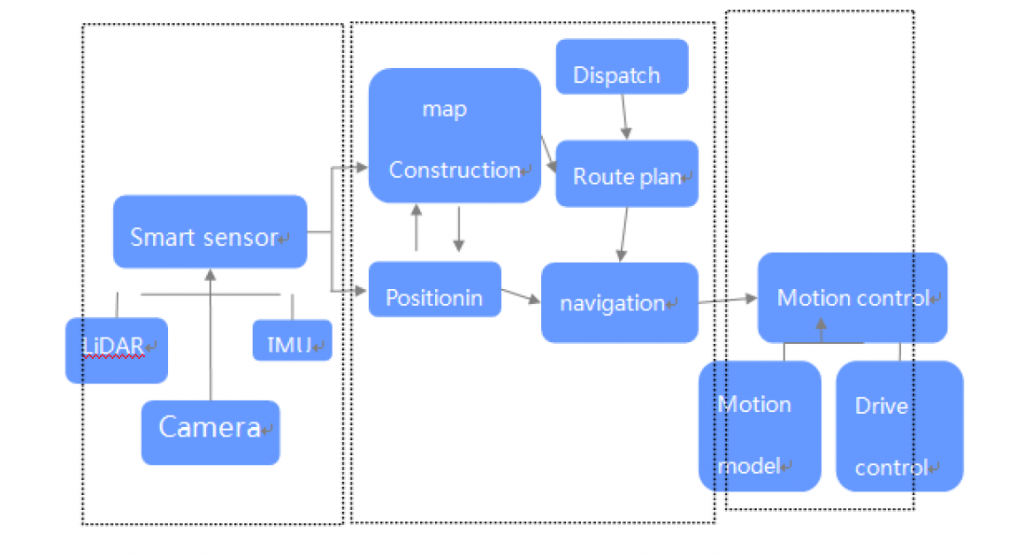
Het systeem is compatibel met de meeste elektrische vorkheftrucks met CAN-bustoegang tot de heftruckchauffeur. De algemene systeemstructuur wordt weergegeven in de onderstaande afbeelding: