Vertrouwen op lidar alleen betekent niet dat de robot autonoom kan bewegen. De lidar kan continu scannen om de puntenwolkgegevens in de 2D- of 3D-dimensionale ruimte te verkrijgen, maar dit kan niet rechtstreeks door de mobiele robot worden gebruikt. Het SLAM-algoritme is nodig voor kaartconstructie en padplanning.
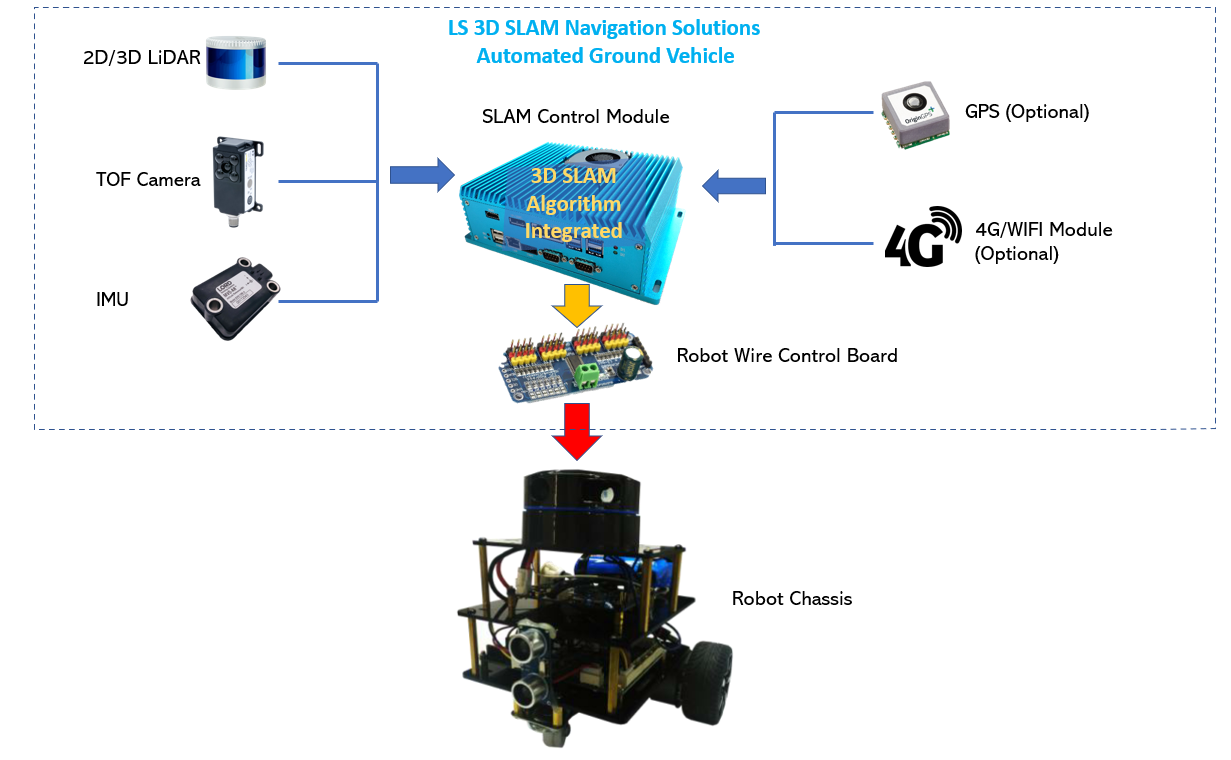
LS ontwikkelde een systeem op basis van de 3D SLAM en multisensorfusie om autonome navigatie te realiseren. Onze klant kan ook de secundaire ontwikkeling uitvoeren op basis van het systeem om zijn eigen applicatiefuncties te bereiken.
Vorkheftrucks met LS 3D SLAM-systeem worden AGV met enkele extra functies toegevoegd, zoals pallet- en containeridentificatie, vorkbediening en intelligent verzendings- en bewakingssysteem enz.